Motorsteuerung Seilführung Wasserschalen und Beleuchtung Befestigung Software
Motorsteuerung

 Die Auf- und Abbewegung der Wasserschalen wird durch an der Decke befestigte Motoren umgesetzt. Durch die Drehbewegung einer an dem Motor befestigten Seilwinde bewegt sich die Glasschale an einem Drahtseil hängend auf und ab.
Die Auf- und Abbewegung der Wasserschalen wird durch an der Decke befestigte Motoren umgesetzt. Durch die Drehbewegung einer an dem Motor befestigten Seilwinde bewegt sich die Glasschale an einem Drahtseil hängend auf und ab.
Für die Installation ist ein Motor nötig, der eine kontinuierliche Rotation in beide Richtungen aufweist. Wichtig sind außerdem für die geeignete Auswahl des Motors dessen Leistungsmerkmale in Bezug auf erreichbare Geschwindigkeit und Positionsgenauigkeit.
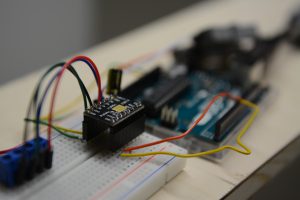
Für den ersten Prototyp wurde ein Servomotor aus dem Modellbaubereich verwendet [16]. Weitere Prototypen wurden zudem sowohl mit einem Stepper Motor mit Getriebe [17], als auch mit einem DC-Motor mit integriertem Encoder [18] erstellt. Die Steuerung erfolgt hier über ein Arduino Board [19]. Bei dem Stepper-Motor wurde zusätzlich ein Treiber verwendet [20], bei dem DC-Motor kam ein Motor-Shield zum Einsatz [21].
In der finallen Installation kommen DC-Motoren des Herstellers FAULHABER zum Einsatz. Hierbei handelt es sich um bürstenlose Motoren mit Planetengetriebe und integrierter Steuerung [22]. Zusätzlich wird eine Adapterplatine desselben Herstellers verwendet [23]. Für die Kommunikation per CANOpen wird ein USB-to-Can Adapter verwendet [24].
[16] http://www.feetechrc.com/product/analog-servo/6kg-cm-360-degree-continuous-rotation-servo-fs5106r/
[17] https://nodna.de/NEMA-17-Planetengetriebe-518-1-Schrittmotor
[18] https://www.pololu.com/product/2822
[19] https://www.arduino.cc/en/Main/ArduinoBoardUno
[20] https://www.pololu.com/product/2128
[21] https://www.pololu.com/product/2507
[22] https://fmcc.faulhaber.com/details/overview/PGR_23501_13826/PGR_13826_13815/de/DE/
[23] https://fmcc.faulhaber.com/details/overview/PGR_23409_18701/PGR_18701_13805/de/DE/
[24] https://www.ixxat.com/de/produkte/industrie-produkte/pc-interfaces/pc-can-interfaces/pc-can-interfaces-details/usb-to-can-v2
Seilführung
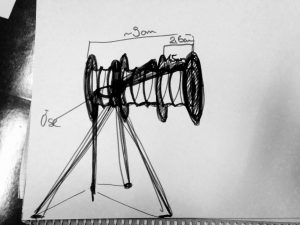
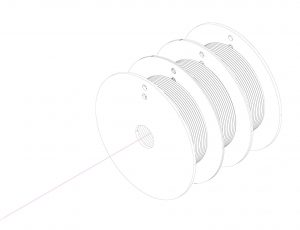
 Eine Kunststoff-Spindel – aus dem einzelhandel als Verpackungsmaterial bekannt – kommt in umfunktionierter Form für den ersten Prototyp zum Einsatz. Weiterhin wurde eine dreigeteilte Seilwinde mit gerilltem Boden als 3D-Modell entwickelt. Die Teilung der Winde durch das Einfügen zusätzlicher Seitenwände ermöglicht den Einsatz von drei Seilen. Die Rillenstruktur und die adäquate Breite des Bodens gewährleisten das gleichmäßige Auf und Abrollen.
Eine Kunststoff-Spindel – aus dem einzelhandel als Verpackungsmaterial bekannt – kommt in umfunktionierter Form für den ersten Prototyp zum Einsatz. Weiterhin wurde eine dreigeteilte Seilwinde mit gerilltem Boden als 3D-Modell entwickelt. Die Teilung der Winde durch das Einfügen zusätzlicher Seitenwände ermöglicht den Einsatz von drei Seilen. Die Rillenstruktur und die adäquate Breite des Bodens gewährleisten das gleichmäßige Auf und Abrollen.
Da in der finalen Version nicht drei, sondern lediglich ein Seil gewickelt werden muss, kommen einfache, 3D gedruckte Spulen zum Einsatz.
Wasserschalen und Beleuchtung
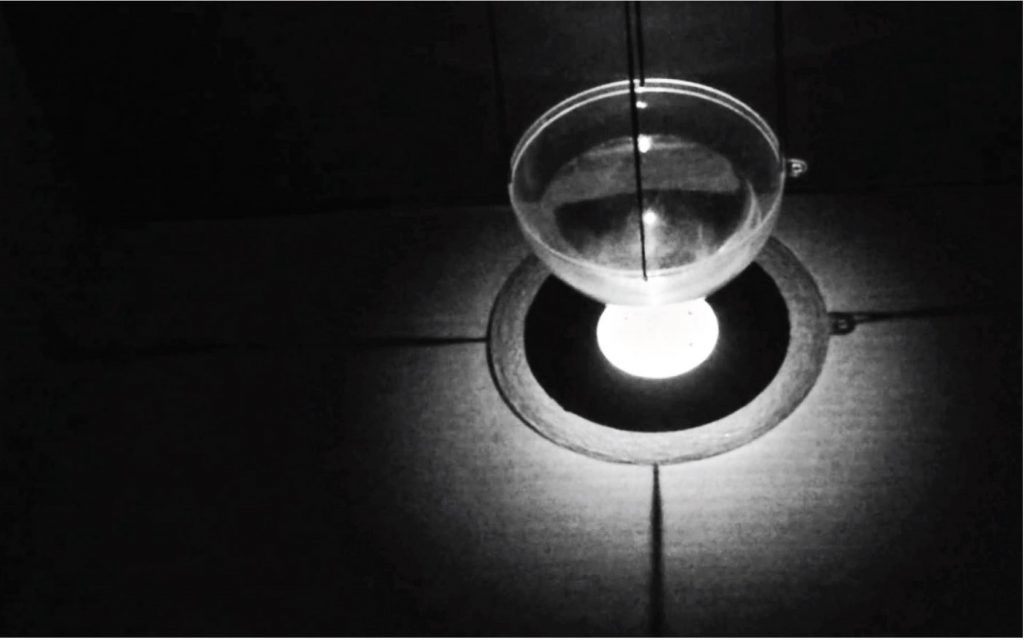
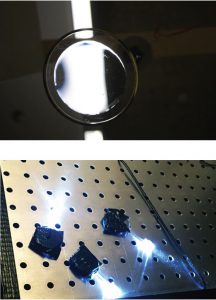

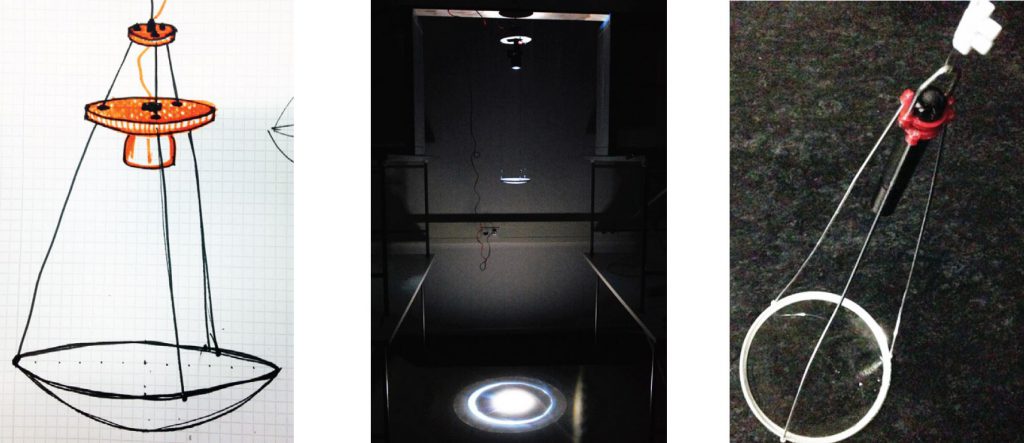 An jedem Motor mit Seilwinde und Seil hängt eine transparente Schale, die mit Wasser gefüllt ist. Für die ersten Prototypen wurden transparente Halbschalen aus Kunststoff verwendet. Da bei diesen die Krümmung zu stark ist, wurde eine eigene Schalenform entwickelt. Sie zeichnet sich durch die Kombination zweier unterschiedlicher Radien aus. Der eine, relativ große Radius ermöglicht einen flachen Schalenboden. Der zweite, relativ geringe Radius verleiht den Schalen die benötigte Höhe, um mit Wasser befüllt zu werden. Diese Art der Bauweise ist vor allem dann wichtig, wenn die Lichtquellen an der Decke fixiert sind. Dies war ursprünglich geplant, brachte jedoch Komplikationen, wie das Aufwickeln von drei Seilen und den fehlenden ästhetischen Gehalt fixierter Lichtquellen, mit sich (in Kapitel „Form und Licht“ ab Seite 56 näher beschrieben). Deshalb besteht der finale Prototyp aus einem an einer einzigen Schnur hängenden Modul. Dieses setzt sich aus der Lichtquelle, der Aufhängung der Glasschale an drei Punkten und der mit Wasser gefüllten Schale selbst zusammen. Bei der Glasschale handelt es sich um ein Uhrenglas.
An jedem Motor mit Seilwinde und Seil hängt eine transparente Schale, die mit Wasser gefüllt ist. Für die ersten Prototypen wurden transparente Halbschalen aus Kunststoff verwendet. Da bei diesen die Krümmung zu stark ist, wurde eine eigene Schalenform entwickelt. Sie zeichnet sich durch die Kombination zweier unterschiedlicher Radien aus. Der eine, relativ große Radius ermöglicht einen flachen Schalenboden. Der zweite, relativ geringe Radius verleiht den Schalen die benötigte Höhe, um mit Wasser befüllt zu werden. Diese Art der Bauweise ist vor allem dann wichtig, wenn die Lichtquellen an der Decke fixiert sind. Dies war ursprünglich geplant, brachte jedoch Komplikationen, wie das Aufwickeln von drei Seilen und den fehlenden ästhetischen Gehalt fixierter Lichtquellen, mit sich (in Kapitel „Form und Licht“ ab Seite 56 näher beschrieben). Deshalb besteht der finale Prototyp aus einem an einer einzigen Schnur hängenden Modul. Dieses setzt sich aus der Lichtquelle, der Aufhängung der Glasschale an drei Punkten und der mit Wasser gefüllten Schale selbst zusammen. Bei der Glasschale handelt es sich um ein Uhrenglas.
Befestigung
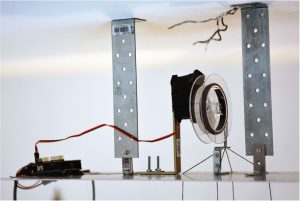
 Für die Entwicklung der Prototypen wurden modulare Systeme verwendet, an denen sich die einzelnen Komponenten einfach fixieren lassen: So war zunächst ein Lochblech im Einsatz, später wurde aus Aluminiumprofilen eine Halterung gefertigt. Die finale Konstruktion besteht aus einer aus Holz gefertigten Kiste pro Einheit: in jeder dieser Boxen befindet sich ein Motor samt Winde, sowie eine Steuerung. Über Klemmen werden die Boxen anschließend an einer Traverse befestigt.
Für die Entwicklung der Prototypen wurden modulare Systeme verwendet, an denen sich die einzelnen Komponenten einfach fixieren lassen: So war zunächst ein Lochblech im Einsatz, später wurde aus Aluminiumprofilen eine Halterung gefertigt. Die finale Konstruktion besteht aus einer aus Holz gefertigten Kiste pro Einheit: in jeder dieser Boxen befindet sich ein Motor samt Winde, sowie eine Steuerung. Über Klemmen werden die Boxen anschließend an einer Traverse befestigt.
Software
 Für die Steuerung der Motoren wird der FAULHABER Motion-Manger verwendet. Hierbei handelt es sich um die eigens für FAULHABER-Motoren entwickelte Steuerungssoftware. Die Programmeirung der Motoren erfolgt durch die Programmiersprache Visual Basic.
Für die Steuerung der Motoren wird der FAULHABER Motion-Manger verwendet. Hierbei handelt es sich um die eigens für FAULHABER-Motoren entwickelte Steuerungssoftware. Die Programmeirung der Motoren erfolgt durch die Programmiersprache Visual Basic.
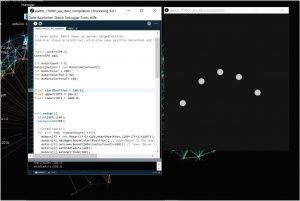
Die Steuerung berechnet im verwendeten Modus das Bewegungsprofil des Motors eigenständig. Hierbei werden die angegebenen Zielpositionen nacheinander abgefahren, wobei der Motor nach Erreichen der Position kurz bremst, bevor die nächste Zielposition angefahren wird. Dieses Verhalten wurde anhand eines Processing-Skriptes nachempfunden, um eine grafische Darstellung des beschriebenen Verhaltens zu erzeugen. Anschließend wurde der entsprechende Algorithmus in Visual Basic innerhalb des sogenannten „Motion Managers“ umgesetzt.